Exhibition Service Robot
Chunxiao Technology · 2019
Role: Full-stack Engineer / System Integration
Cover
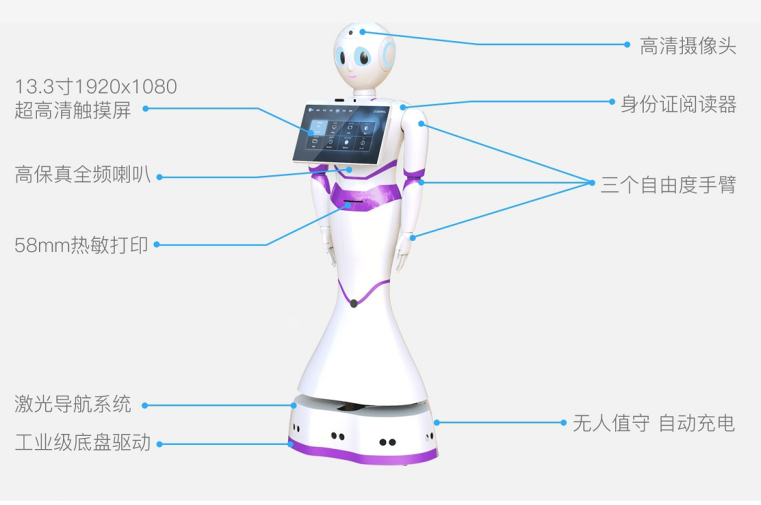
Intelligent service robot for exhibitions and malls. Voice interaction (ASR/TTS), face recognition, autonomous SLAM navigation with centimeter-level precision. Multi-modal interaction and 7x24 continuous operation.
cm-level navigation, >98% face recognition, >90% voice understanding, 7x24 operation, multiple exhibitions
Problem
Exhibitions and malls need interactive robots for guided tours, information, and visitor engagement in dynamic environments.
Solution
Android-based robot system: ROS SLAM navigation with LiDAR, ASR/TTS voice interaction, face recognition for VIP greeting, multi-modal touch/voice/vision interaction, Spring Cloud backend for remote monitoring.
Architecture
Android touch UI → ROS (SLAM/Navigation) → LiDAR/IMU/RGBD sensors → Spring Cloud backend → WebSocket/MQTT
Key Highlights
- ▸Integrated ROS for autonomous navigation with centimeter-level precision
- ▸Developed multi-modal interaction: voice, touch, and vision
- ▸Face recognition for VIP greeting and attendance tracking
- ▸7x24 continuous operation capability for multi-day events
Tech Stack
What I Learned
Multi-modal interaction fusion provides redundancy in noisy environments; SLAM tuning for dynamic exhibition halls requires careful parameter calibration; rule-based + API-driven approach was practical when AI wasn't yet mature.